gekit orin ALP-607 LEETOP Unit User Manual
- June 9, 2024
- gekit orin
Table of Contents
- gekit orin ALP-607 LEETOP Unit
- Service and Support
- Warranties
- DOCUMENT CHANGE HISTORY
- Specifications
- I/O
- Install Dimension
- Interface description
- Funtion introduct
- Recovery mode
- lnstall system image
- Switching working modes
- Xshell
- System setting
- View System Version
- Make a backup image
- Installation of Jtop tools
- Developer Tools
- Sample Applications
- Development tool
- FCC Warnning
- Read User Manual Online (PDF format)
- Download This Manual (PDF format)
gekit orin ALP-607 LEETOP Unit
Notice
- Please read manual carefully before install, operate, or transport Leetop device.
- Ensure that the correct power range is being used before powering the device.
- Avoid hot plugging.
- To properly turn off the power, please shut down the Ubuntu system first, and then cut off the power. Due to the particularity of the Ubuntu system, on the Nvidia
- developer kit, if the power is turned off when the startup is not completed, there will be a 0.03% probability of abnormality, which will cause the device to fail to start. Due
- to the use of the Ubuntu system, the same problem also exists on the Leetop device.
- Do not use cables or connectors other than described in this manual.
- Do not use Leetop device near strong magnetic fields.
- Backup your data before transportation or LeetolP device is idle.
- Recommend to transport Leetop device in its original packaging.
Service and Support
Technical Support
Leetop is glad to help you with any questions you may have about our product,
or about the use of the technology for your application. The fastest way is
sending us an email: service@leetop.top
Warranties
Warranty period: One year from the date of delivery.
Warranty content: Leetop warrants the product manufactured by us to be free
from defects in material and workmanship during warranty period. Please
contact service@leetop.top for return material authorization (RMA) prior to
returning any items for repair or exchange. The product must be returned in
its original packaging to prevent damage during shipping. Before returning any
product for repair, it is recommended to back up your data and delete any
confidential or personal data.
Packing List
-
Leetop-ALP607 x 1
Non-standard equipment: -
Power adapter x 1
-
Power cord x 1
DOCUMENT CHANGE HISTORY

Brief
Leetop-ALP607 is an embedded artificial intelligence computer capable of
delivering up to 70/100 TOPS of computing power to numerous end devices.
Leetop-ALP607 provides fast passive heat dissipation design, which can meet
industrial standards such as seismic and anti-static. At the same time,
Leetop-ALP607 interface rich, high cost performance.

Specifications
Processor


I/O

Install Dimension
Leetop-ALP607 Dimensions as below:

Interface description
Front interface
Rear interface


Note: UART2 is converted to 3.3V logic level by the on-board level switching circuit; SPI0 is converted to 3.3V logic level by the on-board level switching circuit; GPIO2_3V3 is 3.3V logic level;
Funtion introduct
Operating system setup
Hardware preparation
• Ubuntu 18.04 IPC x1
Type-C data cable x1
Download the system image package to the PC host of the Ubuntu18.04 system: Burn-in steps
- Use a USB cable to connect the USB Type-A of the PC of the Ubuntu18.04 system to the Type-C of the ALP607;
- Power on the ALP607 and enter Recovery mode;
- Open the Nvidia-SOK-Manager on the PC, as shown in the figure below, selectJetson Orin NX in the interface to download theJetpackS.1 system image package and development tools. From https://developer.nvidia.com/embedded/downloads or download the latest Jetson Linux distribution package and Jetson development kit sample file system. Uetson Linux Driver Package (L4T))
- Download the accompanying driver:
Link: https://pan.baidu.com/s/1YwEhYBj6aiZgABXGYL-IXA
Extraction code: 9ihb

Please contact us for the rest of the information:
service@leetop.top
Unzip the downloaded image package and enter the Linux for Tegra(L4T) directory

Enter the Linux_for _tegra directory and use the flash command(flash to NVMe))

flash to USB

Recovery mode
Leetop-ALP607 can use USB to update the system. You need to enter USB Recovery mode to update the system. In USB Recovery mode, you can update the file system, kernel, boot loader, and BCT. Steps to enter recovery mode:
- Turn off the system power, make sure that the power is turned off instead of in standby mode.
- Use the USB Type-C to USB Type A cable to connect the carrier board to the host.
- Power on the device.
- Hold down the RECOVERY button and press and release the reset button. Wait 2 seconds for the RECOVERY button to be released.
Note:
Please follow the steps of the update manual for system update. when entering USB recovery mode, the system will not start, and the serial port will not have debugging information output’.
lnstall system image
a) Connect USB type-A of Ubuntu 18.04 Host to Type-c of Leetop- ALP607;
b) Power up Leetop- ALP607 and enter Recovery mode(RCM);
c) The PC Host enters the L4T directory and executes the flashing instruction:

d) After flashing, power on Leetop- ALP607 again and log in to the system.
Switching working modes
After logging in to the system, you can modify the operation by clicking on the top right corner of the system interface, as shown in the picture;
Alternatively, switch by entering the following command in the terminal:

Xshell
Xshell is a powerful security terminal emulation software, it supports SSH1,
SSH2, and TELNET
protocol of Microsoft Windows plaitform. Xshell’s secure connection to remote
hosts through the Internet and its innovative design and features help users
enjoy their work in complex network
environments. Xshell can be used to access servers under different remote
systems under the
Windows interface, so as to better achieve the purpose of remote control of
the terminal. xshell
is not necessary, but it can better assist us in using equipment. It can link
your Windows system with your Ubuntu system, allowing you to operate your
Linux system under Windows system. To install xshell, you can download and
install it by searching Baidu on the Internet. (When the product cannot enter
the desktop system, you can also use xshell to perform remote control and
modify configuration errors).
open xshell.

Newly bulit

Fill in the name and host ip(normally you can connect through the network ip, if you do not know the ip, you can connect the computer and the OTG port of the device through the· usb data cable, fill in the fixed ip to connect)
192.168.55.1

Enter the user and password
Click Connect to enter the command line interface

Operate jetsam devices remotely through xshell

System setting
User: nvidia Password: nvidia
-
NVIDIA Linux For Tegra (L4T)
The board supports native NVIDIA Linux For Tegra (L4T) Builds. HDMI, Gigabit Ethernet, U5B3.0, USB OTG, serial port, GPIO, I2C bus are all supported and can run directly on the A607 without modification.
Detailed instructions and tools download links: https://developer.nvidia.com/embedded/jets on-linux-r3521
Note: The native system does not support PWM fan control. If the native system is used, IPCall-BSP must be deployed -
NVIDIA}etpack for L4T
Jetpack is a software package released by NVIDIA that contains all of the software tools needed for Orin NX development using ALP607. It includes both host and target tools, including 05 images, middleware, sample applications, documentation, and more. The newly released JetPack runs on Ubuntu 20.04 Linux 64-bit hosts.
It can be downloaded from the following link:
https://developer.nvidia.com/embedded/jetpack
System setting
The Leetop-ALP607 runs Ubuntu 20.04. The default user name is nvidia and the password is nvidia -
Development data and forum
L4T development data: https://developer.nvidia.com/embedded/linux-tegra
Developer forum: https://forums.developer.nvidia.com/
View System Version
View the installed system package version
1 cat /etc/nv_tegra_release
View information about the installed JetPack
1 sudo apt show nvidia-jetpack
Make a backup image
Backup images need to be created in the CLI environment. Only the system.img file is backed up
- Use A USB cable to connect USB Type-A of the Ubuntu18.04 PC to Type-C of the ALP607.
- Power on the ALP607 and enter the Recovery mode;
- Go to the Linux_for_tegra directory and backup data by referring to
README_backup_restore.txt in backup_restore.
Instructions for backing up the Jetson Orin NX core module

- Use the backup image for brushing
 If the backup
image can be used normally, it indicates that the backup image is available.
If the backup
image can be used normally, it indicates that the backup image is available.
Installation of Jtop tools
Jtop is a system monitoring utility for Jetson that can be run on a terminal
to view and control the status of NVIDIAJetson in real time.
nstal lation steps:
-
Installing the pip3 tool
1 sudo apt-get install python3-pip -
Installing jtop packages with pip3 1 sudo -H pi p3
install -u jetson-stats -
jtop Restart to run jtop
1 jtop
When run, the image below shows

Developer Tools
letPack
NVIDIA JetPack SOK is the most comprehensive solution for building Al
applications. It bundles Jetson platform software including TensorRT, cuDNN,
CUDA Toolkit, VisionWorks, GStreamer, and OpenCV, all built on top of L4T with
LTS Linux kernel.
JetPack includes NVIDIA container runtime, enabling cloud-native technologies
and workflows at the edge. etPack SOK Cloud-Native on !etson
L4T
NVIDIA L4T provides the Linux kernel, bootloader, NVIDIA drivers, flashing
utilities, sample filesystem, and more for the Jetson platform.
You can customize L4T software to fit the needs of your project. By following
the platform adaptation and bring-up guide, you can optimize your use of the
complete Jetson product feature set. Follow the links below for details about
the latest software libraries, frameworks, and source packages.
DeepStream SDK on Jetson
NVIDIA’s DeepStream SOK delivers a complete streaming analytics toolkit for
Al-based multisensor processing, video and image understanding. DeepStream is
an integral part of NVIDIA Metropolis, the platform for building end-to-end
services and solutions that transform pixel and sensor data to actionable
insights. Learn about the latest 5.1 developer preview features in our
developer news article.
Isaac SDK
The NVIDIA Isaac SDK makes it easy for developers to create and deploy Al- powered robotics. The SOK includes the Isaac Engine (application framework), Isaac GEMs (packages with highperformance robotics algorithms), Isaac Apps (reference applications) . These tools and APls accelerate robot development by making it easier to add artificial intelligence (Al) for perception and navigation into robots.
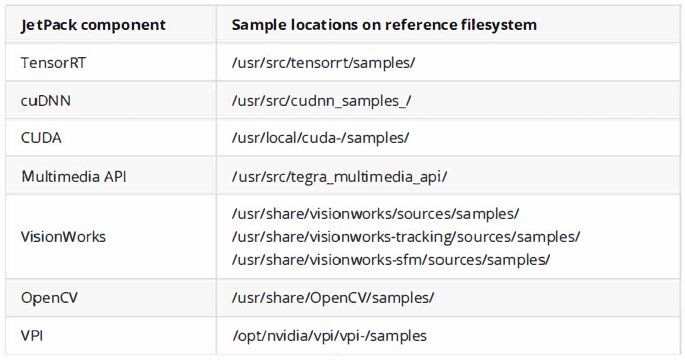
Sample Applications
JetPack includes several samples which demonstrate the use of JetPack components. These are stored in the reference filesystem and can be compiled on the developer kit.
Development tool
Developer Tools JetPack includes the following developer tools. Some are used directly on a Jetson system, and others run on a Linux host computer connected to a Jetson system.
- Tools for application development and debugging:
- NSight Eclipse Edition for development of GPU accelerated applications: Runs on Linux host computer. Supports all Jetson products.
- CUDA-GDB for application debugging: Runs on the Jetson system or the Linux host computer. Supports all Jetson products.
- CUDA-MEMCHECK for debugging application memory errors: Runs on the Jetson system. Supports all Jetson products.
- Tools for application profiling and optimization:
- NSight Systems for application multi-core CPU profiling: Runs on the linux host computer. Helps you improve application performance by identifying slow parts of code. Supports all Jetson products.
- NVIDIA® Nsight™ Compute kernel profiler: An interactive profiling tool for CUDA applications. It provides detailed performance metrics and API debugging via a user interface and command line tool.
- NSight Graphics for graphics application debugging and profiling: A console-grade tool for debugging and optimizing OpenGL a1nd OpenGL ES programs. Runs on the Linux host computer. Supports all Jetson products.
Leetop Technology (Shenzhen) Co., Ltd. http://www.leetop.top
FCC Warnning
This equipment has been tested and found to comply with the limits for a Class B digital device, pursuant to part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a residential installation. This equipment generates, uses and can radiate radio frequency energy and, if not installed and used in accordance with the instructions, may cause harmful interference to radio communications. However, there is no guarantee that interference will not occur in a particular installation. If this equipment does cause harmful interference to radio or television reception, which can be determined by turning the equipmentoff and on, the user is encouraged to try to correct the interference by one or more of the following measures:
- Reorient or relocate the receiving antenna.
- Increase the separation between the equipment and receiver.
- Connect the equipment into an outlet on a circuit different from that to which the receiver is connected.
- Consult the dealer or an experienced radio/TV technician for help.
Caution: Any changes or modifications to this device not explicitly
approved by manufacturer could void your authority to operate this equipment.
This device complies with part 15 of the FCC Rules. Operation is subject to
the following two conditions:
(l)This device may not cause harmful interference, and (2) this device must
accept any interference received, including interference that may cause
undesired operation.
This equipment complies with FCC radiation exposure limits set forth for an
uncontrolled environment. This equipment should be installed and operated with
minimum distance 20cm between the radiator and your body.
Read User Manual Online (PDF format)
Read User Manual Online (PDF format) >>